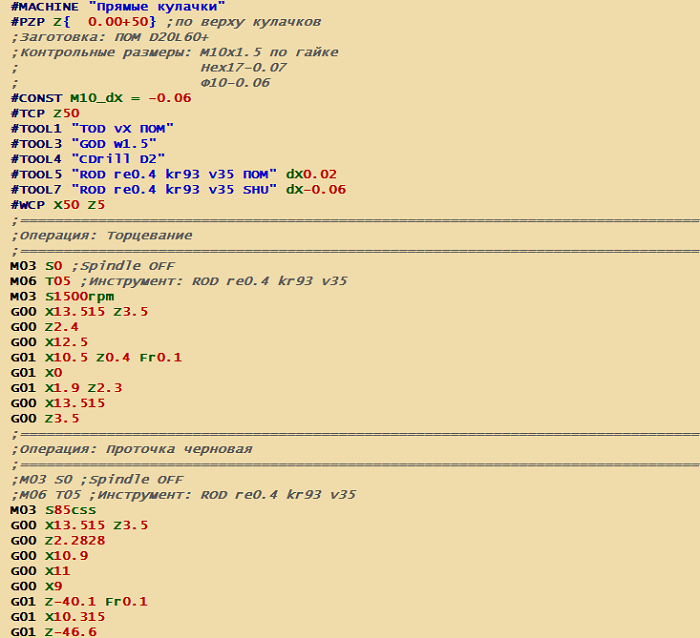
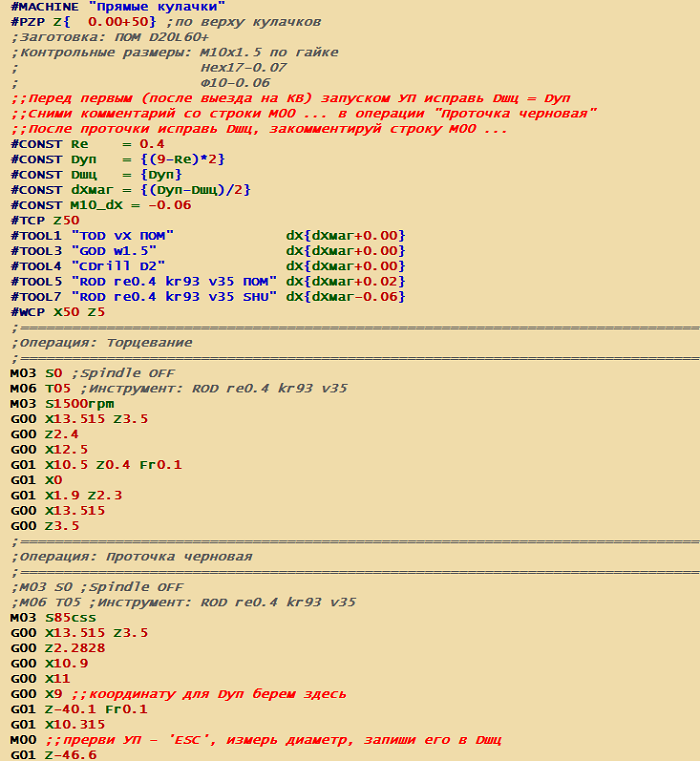
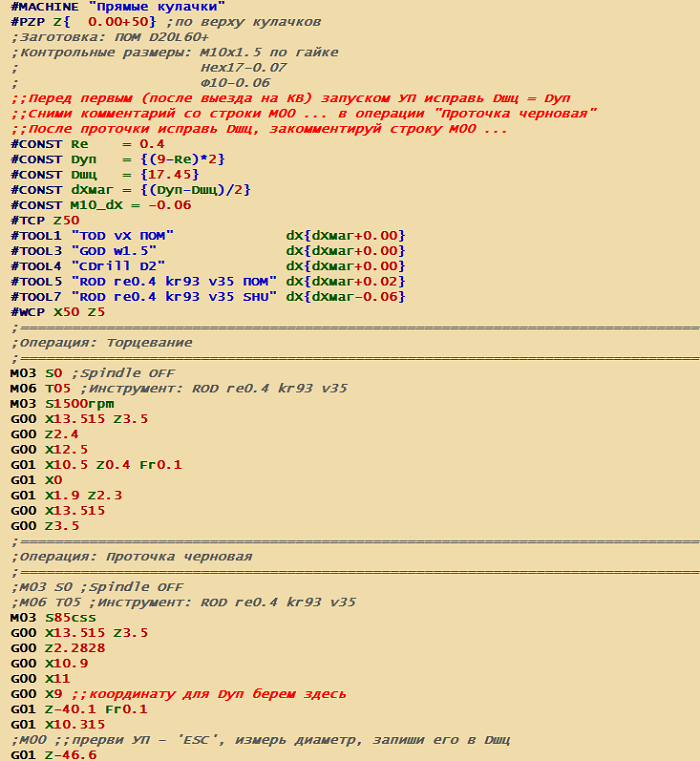
Концевые выключатели (КВ) определяют нули оборудования по каждой из осей. Для приводов без обратной связи (энкодеров) от точности КВ зависят неконтролируемые смещения относительно оснастки или неподвижных частей оборудования. Один из выходов - привязка к каждой обрабатываемой детали или неподвижной оснастке после процедуры выезда на КВ. Далее в статье описан альтернативный вариант. В нём используется свойство редактора управляющих программ (УП) по решению математических выражений. Ниже представлена одна из возможных реализаций этого варианта. В примере корректируется ошибка КВ по оси X токарного станка. В качестве примера взята УП тестового изделия Болт М10х40 DIN931.
Приборостроительное объединение
e-mail: cnc@electrondesign.ru
тел.: (495) 799-90-94